Movelt Proロゴ
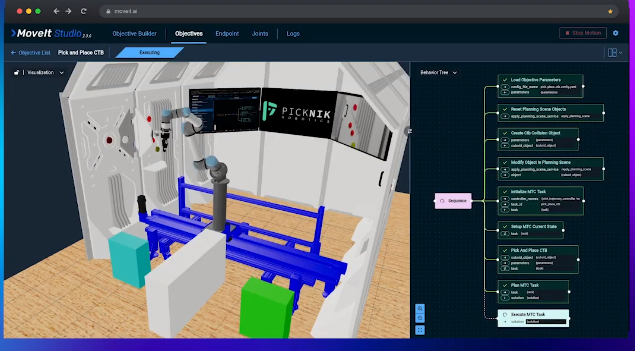
Movelt Proスクリーンショット
Movelt Proスクリーンショット
サマリー
MoveIt Pro は、本番運用グレードのロボティクス・アプリケーションプラットフォームです。ロボット上で動作するランタイムの“マニピュレーション・エンジン”と、オプションの開発者向けUIを備え、点在するツールを寄せ集めるよりもはるかに高速に、上級チームが高度な ROS 2 ロボットアーム・アプリケーションを構築・テスト・デプロイできるようにします。ローコードの Behavior Tree(BT)ビルダー、充実したデバッグツールチェーン(ブラックボードとブレークポイント)、ロボット・ビジュアライザ、複数モードの遠隔操作スイート、そして認識に基づくモーション/タスクのシーケンス/リカバリに使える 200以上のプリビルト・ビヘイビア を、単一スタックに統合しています。
経営層にとっての価値は明確です。実績あるビヘイビア群と堅牢なランタイムを再利用することで、一般に 12〜24か月早く 立ち上げられます。さらに、ハードウェア非依存 の設計により、ROS対応のアーム、グリッパ、各種センサ、深度カメラ、リニアレール、さらには全身タスク向けのモバイルベースまで幅広く活用でき、ベンダーロックインを回避できます。プラットフォームはROSネイティブで、事実上の標準ミドルウェアを活用し、既存ノードやツール群との統合を容易にします。
開発者向けハイライト としては、AI学習データ生成やオフライン開発のための 統合シミュレーション・パイプライン、セグメンテーション/把持トランスフォーマおよび視覚言語セグメンテーションに対応した ONNXモデル取込み、さらに オフライン/エアギャップ環境でのインストール、ユーザー権限、CI/CD連携、LTS(長期サポート) などのエンタープライズ機能を提供。これらにより、マニピュレーション、ビンピッキング、スキャン・ピック・プレース、複数アーム協調、モバイルマニピュレーションにおける「学習→デプロイ」のループを短縮し、リスクを低減します。
規制産業や安全クリティカルな取り組みには、MoveIt Pro Core(認証可能な制御モジュール) が有効です。軽量でリアルタイムなC++製コントローラ/プランナ/IKソルバを、豊富なユニットテストとコーディング規約チェッカ(例:MISRA C++/SEI CERT)とともに、決定性・V&V(検証/妥当性確認)・監査容易性を重視したスタンドアロン・ライブラリとして提供します。対応ターゲットは x86-64/Arm64 の Ubuntu 22.04以降 および Debian Bookworm。Core には VFC、JTAC(軌道スティッチングを備えたジョイント軌道アドミッタンス)、JVC、衝突考慮の PoseJog、IKソルバ(VelocityIK、PathIK、PoseIK)に加え、Pro RRT プランナと Pro Planning Scene が含まれます。
直近のリリースでは、UI内でテキストプロンプトからツリーを下書きする LLM Behavior Tree Builder、および既存のオープンソース実装比で 約10倍高速 な PoseIK ソルバを追加。継続的なエンジニアリングの推進力を示しています。
最後に、MoveIt Pro は従来の MoveIt Studio の進化形であり、実運用向けランタイムとオプションの開発者プラットフォームという実態に即した新ブランディングです。オープンソースの MoveIt 2 で試作した後、MoveIt Pro はスケール展開に耐えるエンタープライズ移行パスを提供し、Core によって監査が求められる安全クリティカルなループを分離できます。
製品紹介
MoveIt Pro は、ROSネイティブ設計により既存ノードやツール群との統合を容易にします。ハードウェア非依存 のアーキテクチャを採用し、ROS互換のアーム、グリッパ、各種センサ、深度カメラ、リニアレール、さらには全身タスク向けモバイルベースまで柔軟に対応可能です。実績あるビヘイビアと堅牢なランタイムを再利用することで、一般に 12〜24か月早い 立ち上げを実現します。
機能一覧
行動木(Behavior Tree)ビルダー
- 直感的なローコードUIで複雑なタスクを構成
- ブラックボードやブレークポイントによるデバッグを統合
- ビジュアル化された実行経路と状態監視
デバッグ/可視化/テレオペレーション
- 豊富なデバッグツール(ブラックボード、ブレークポイント、ログ)
- ロボット・ビジュアライザで関節状態・コリジョン・プランニングシーンを確認
- 手動介入や監督に適した複数モードのテレオペレーション
プリビルト・ビヘイビア(200+)
- 認識に基づくモーション、タスクシーケンス、エラーリカバリ
- 典型的なピック&プレース、スキャン、整列、検査などに即応
シミュレーションとAI統合
- 学習データ生成やオフライン開発のための統合シミュレーション
- ONNX モデル取込み:セグメンテーション/把持トランスフォーマ、視覚言語セグメンテーション等
エンタープライズ機能
- オフライン/エアギャップ 環境への導入に対応
- ユーザー権限、CI/CD連携、LTS(長期サポート)
最新拡張
- UI内の LLM Behavior Tree Builder:テキストプロンプトからBTの下書きを生成
- PoseIK:既存のオープンソース実装比で 約10倍高速
開発者向けハイライト
- 学習→デプロイ の反復を短縮する統合パイプライン
- ログ、メトリクス、テスト容易性を高めるBTベース設計
- シミュレータと実機の切替・並行検証を支援
MoveIt Pro Core(認証可能な制御モジュール)
MoveIt Pro Core は、軽量・リアルタイムなC++実装の コントローラ/プランナ/IKソルバ を、広範なユニットテストとコーディング規約チェッカ(例:MISRA C++/SEI CERT)とともに、決定性・V&V(検証/妥当性確認)・監査容易性を重視した スタンドアロン・ライブラリ として提供します。
- 対応OS/アーキテクチャ:Ubuntu 22.04以降、Debian Bookworm(x86-64/Arm64)
- 代表機能:VFC、JTAC(ジョイント軌道アドミッタンス+軌道スティッチング)、JVC、PoseJog(衝突考慮)
- IKソルバ:VelocityIK、PathIK、PoseIK
- プランナ/シーン:Pro RRT プランナ、Pro Planning Scene
導入メリット(ビジネス視点)
- 市場投入の前倒し:200+ビヘイビアと堅牢なランタイムの再利用により、一般に 12〜24か月 の立ち上げ短縮
- リスク低減:検証可能なCoreと一貫したツールチェーンで、品質と再現性を確保
- ロックイン回避:ROS 2準拠かつハードウェア非依存で、装置・センサの選択肢を拡大
- 運用効率:テレオペや監督介入が可能で、ライン停止を最小化
- 拡張容易性:ONNX対応により認識・把持のMLモデル導入を円滑化
アーキテクチャと互換性
- ROSネイティブ:既存のノード、トピック、ツールとシームレスに連携
- ハードウェア非依存:ROS対応のアーム、グリッパ、センサ、深度カメラ、リニアレール、モバイルベースなどに対応
- 展開形態:オンライン環境/オフライン・エアギャップ 環境の双方に対応
- CI/CD:ビルド/テスト/デプロイの自動化に適合
ユースケース
マニピュレーション/ピック&プレース
- 視覚情報に基づく高精度な把持と配置
- リトライ・回復行動を含む頑健なタスクフロー
ビンピッキング/スキャン・ピック・プレース
- 乱雑堆積や未整列ワークに対する動作計画
- スキャン→把持→配置までの一貫オーケストレーション
複数アーム協調/モバイルマニピュレーション
- 協調タスクや全身(Whole-body)動作への拡張
- モバイルベース連携による作業領域拡大
品質検査/軽作業自動化
- ビヘイビア再利用でスループットと安定性を両立
- トレーサビリティのためのログ/メトリクス活用
セキュリティ/コンプライアンス
- V&V/監査容易性:Coreによる決定性の高い制御、ユニットテスト、コーディング規約チェック
- 権限管理:ユーザー権限 による運用ガバナンス
- 分離導入:オフライン/エアギャップ 環境での運用に適合
よくある質問(FAQ)
Q1. MoveIt ProとオープンソースのMoveIt 2の関係は?
A. MoveIt 2での試作から、MoveIt Pro は本番展開に必要なツールチェーンや運用要件(権限、LTS、オフライン導入など)を補完し、スケール可能なパスを提供します。
Q2. 既存のロボットやセンサに対応できますか?
A. ハードウェア非依存 設計のため、ROS互換デバイスであれば幅広く統合可能です。
Q3. 安全クリティカルな用途には使えますか?
A. MoveIt Pro Core が、決定性・監査容易性を重視したコントロールスタックを提供し、V&Vプロセスの基盤になります。
Q4. 競合製品との違いは?
A. 一般論として、個別ツールを寄せ集める方式では初期構築と長期運用の両面で負債が積み上がりがちです。MoveIt Pro はBTベースの一体型スタック、200以上のビヘイビア、オンボードのデバッグ/可視化、Coreによる決定性制御などを統合し、学習→デプロイ の反復を短縮します。
メーカーの製品サイト
https://picknik.ai/pro/
【言語】英語
【動作環境】Windows